














 27 / 60
27 / 60

Rubrik 27
01 | LICHT
GEDANKEN
Kontakt
Dr. Roy Müller
Institut für Sportwissenschaft
Seidelstraße 20, 07749 Jena
Telefon: 03641 / 945724
E-Mail:
roy.mueller@uni-jena.de www.spowi.uni-jena.deOriginal-Publikation
Müller R et al. (2016) Human and avian
running on uneven ground: a model-based
comparison. J. R. Soc. Interface 20160529.
http://dx.doi.org/10.1098/rsif.2016.0529se-Feder-Systems«, hinreichend exakt
beschreiben. Dieses Modell stellt die
Beine vereinfacht als elastische Federn
dar, die die Körpermasse tragen. Auf
diese Weise lassen sich in Experimen-
ten erhobene Daten direkt miteinander
vergleichen.
Beim Laufen in unebenem Gelände
passen sowohl Mensch als auch Vogel
die Bewegung an die Unebenheiten an.
»Und dies – obwohl es sich um gänzlich
unabhängig entwickelte Mechanismen
handelt – auf recht ähnliche Art und
Weise«, nennt Müller ein Ergebnis der
Arbeit. Im Falle einer Vertiefung im Bo-
den zieht der Läufer das Schwungbein
in der späten Schwungphase zurück,
was zu einem steileren Aufsatzwinkel
des Beines führt. Gleichzeitig wird das
Bein »verlängert«, indem es gestreckter
aufsetzt. »Anders als Vögel modulieren
Menschen zudem über die Federfestig-
keit den Bewegungsablauf.«
Wie humanoide Roboter laufen
Diese Erkenntnisse, so machen die
Autoren deutlich, sind in erster Linie
Grundlagenforschung. Langfristig las-
se sich dieses Wissen aber auch prak-
tisch nutzen – etwa in der Verbesserung
der Fortbewegung von humanoiden
Robotern.
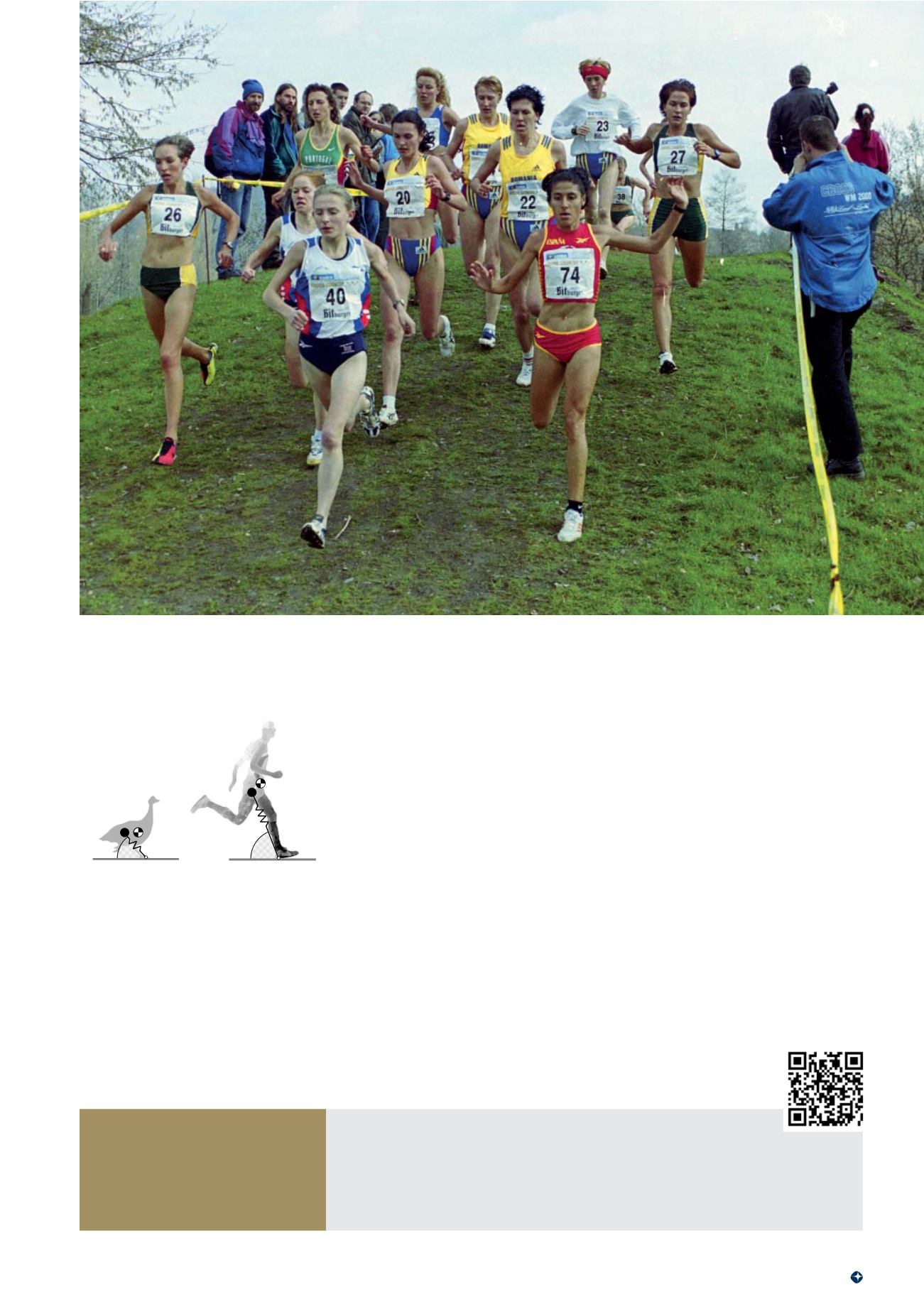
Guinea fowl
1.2kg
Human
80kg
68°
45°
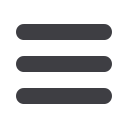
Crossläufer – auch bei hohem Tempo geraten sie nur selten ins Straucheln.
Ähnlich, aber nicht gleich: Das »Masse-Feder-
Modell« zeigt die Unterschiede beim Laufen von
Vogel und Mensch. So weichen beispielsweise
die Winkel, in denen die Beine aufsetzen, deutlich
voneinander ab. Abbildung aus der Original-
Publikation.